معروف است که سیستمهای پیچیده در مقیاس ریز، اجزایشان برهمکنشهای موضعی دارند ولی در مقیاس درشت، رفتارهای «پدیداره» از خود نشان میدهند که شبیه به رفتار اجزا در مقیاس ریز نیستند. اما به راستی این پدیدارگی چیست؟ آیا درک ویژگیها یا رفتارهای پدیداره نیاز به چیزهای دیگری دارد؟ در این سخنرانی که بر اساس مقاله مروری زیر است، به این مسئله میپردازیم.
اگر $n$ جسم و $n+1$ نخ را بهصورت یک در میان به یکدیگر متصل کنیم و مجموعه را بهطور قائم بیاویزیم، با پایین کشیدن نخ آخر، بسته به اینکه چه شتابی به آن داده باشیم، یکی از نخها پاره میشود. در این مقاله به حل کلی این مسئله که کدام نخ پاره خواهد شد میپردازیم. بخش اول مقاله به فرمولبندی ریاضی مسئله با در نظر گرفتن نخها بهصورت فنرهایی با ثابتهای بهاندازه کافی بزرگ و بخش دوم به بررسی دو حالت خاص $n=1$ و $n=2$ اختصاص مییابد.
نگاره ۱: اجسام آویزان از سقف
فرمولبندی مسئله
$n$ جسم و $n+1$ نخ آنطور که در شکل ۱ نشان داده شده است را در نظر میگیریم. جرم هرکدام از اجسام را برابر $m$ و نخها را بی جرم فرض میکنیم. همانطور که در شکل مشخص است، سیستم در شتاب گرانش $g$ قرار دارد. به نخ پایین نیروی ثابت $F$ را وارد میکنیم بهطوری که شتاب ثابت $a$ را به سمت پایین به انتهای نخ آخر بدهد. برای بهدست آوردن زمان پاره شدن نخها، ابتدا $x_i(t)$ها را که در شکل مشخص شدهاند بهدست میآوریم. بعد از این کار کافی است فرض کنیم که اگر نخها بهاندازه $\Delta l$ کشیده شوند پاره میشوند.
برای بررسی حرکت دستگاه، نخها را بهصورت فنرهایی با طول اولیه $l_0$ و ثابت $k$ در نظر میگیریم. وقتی این مجموعه را بهطور قائم بیاویزیم، طول نخ $p$ام (از بالا) بهاندازه $\Delta l_p = (n-p+1)mg/k$ افزایش مییابد که ناشی از وزن اجسام است. در این حالت با انتخاب نقاط مرجع مناسب میتوانیم تابع انرژی پتانسیل را بهصورت زیر تعریف کنیم.
توجه کنید که $x_p(t)$ از محل تعادل جرم شماره $p$ (از بالا) و $x_0=0$ در نظر گرفته شده. در واقع در این حالت جملات ثابتی نیز باید در انرژی پتانسیل دستگاه در نظر گرفت که به علت عدم تأثیر در معادلات حرکت از نوشتن آنها صرفنظر کردهایم.
با توجه به اینکه $m\ddot{x}_p = -\partial U / \partial x_p$، معادلات حرکت را میتوان چنین نوشت:
همچنین $C_{p1} = (pa/2(n+1))$ و $C_{p2}=0$ است. $C_{p3} = (map/6k(n+1))(p^2-n(n+2)-1)$ و با توجه به شرایط اولیه $x_p(0) = \dot{x}_p(0) = 0$، ضرایب $A_{pj}$ و $B_{pj}$ نیز مشخص میشوند. با مشخص شدن $x_j(t)$ها، میتوانیم معادلات مربوط به پاره شدن نخها را بهدست آوریم. برای این کار کافی است فرض کنیم که وقتی نخها بهطور مشخص $L$ میرسند پاره میشوند. پس زمان پاره شدن نخها را باید از روابط زیر بهدست آوریم:
زمان پاره شدن نخ $p$ام، $t_p$، با قرار دادن $x_{p-1}$ و $x_p$ در معادلهٔ $p$ام (از بالا) دستگاه معادلات (۳) و حل آن بهدست میآید. با مقایسهٔ مقادیر زمانهای لازم برای پاره شدن نخها میتوانیم نخی را که در اثر کشیدن انتهای پایینی مجموعه پاره میشود مشخص کنیم. از آنجا که که بررسی جوابها حتی در حالت $n=1$ به سبب وجود جملات مثلثاتی کار آسانی نیست از روشهای عددی استفاده میکنیم و مسئله را در حالتهای خاص (یک و دو جسم) بررسی میکنیم.
حالت خاص n=1
فرض کنید فقط یک جسم داریم. این مسئله معمولاً در درس مکانیک مقدماتی برای دانشجویان مطرح میشود و بهطور کیفی نیز به آن پاسخ داده میشود. در اینجا به حل کمی این مسئله میپردازیم. در این حالت، معادله حرکت جسم چنین است:
پس معادلات مربوط به زمان پاره شدن نخها چنیناند ($l = mg/k$):
$$\Delta l \mathbin{-} l = \frac{a}{2\omega^2}( \cos(\omega t_1)\mathbin{-} 1) + \frac{a}{4}t^2_1, \quad (۴)$$ $$\Delta l = \frac{-a}{2\omega^2}( \cos(\omega t_2)\mathbin{-} 1) + \frac{a}{4}t^2_2.$$
پارامترهای مؤثر در زمان پاره شدن نخ $k/m$ ، $\Delta l$ و $a$ هستند. ابتدا حالتی خاص را بررسی میکنیم. فرض کنید $k/m$ هزار بر مجذور ثانیه و $\Delta l$ دو میلیمتر باشد. این مقادیر گستره بزرگی از حالتهای معمول و قابل آزمایش در مورد این مسئله را در بر میگیرند. با حل عددی و بهدست آوردن $t_1$ و $t_2$ از معادلات (۴) بهازای این مقادیر $k/m$ و $\Delta l$ و برای چندین شتاب مختلف نمودار شکل ۲ بهدست میآید. این نمودار نشان میدهد که (برای شتابهایی در بازه مشخص شده در شکل) برای شتابهای بهاندازه کافی بزرگ، نخ پایینی و برای شتابهای کم، نخ بالایی پاره میشود این نتیجهگیری با درک شهودی ما از مسئله کاملاً توافق دارد.
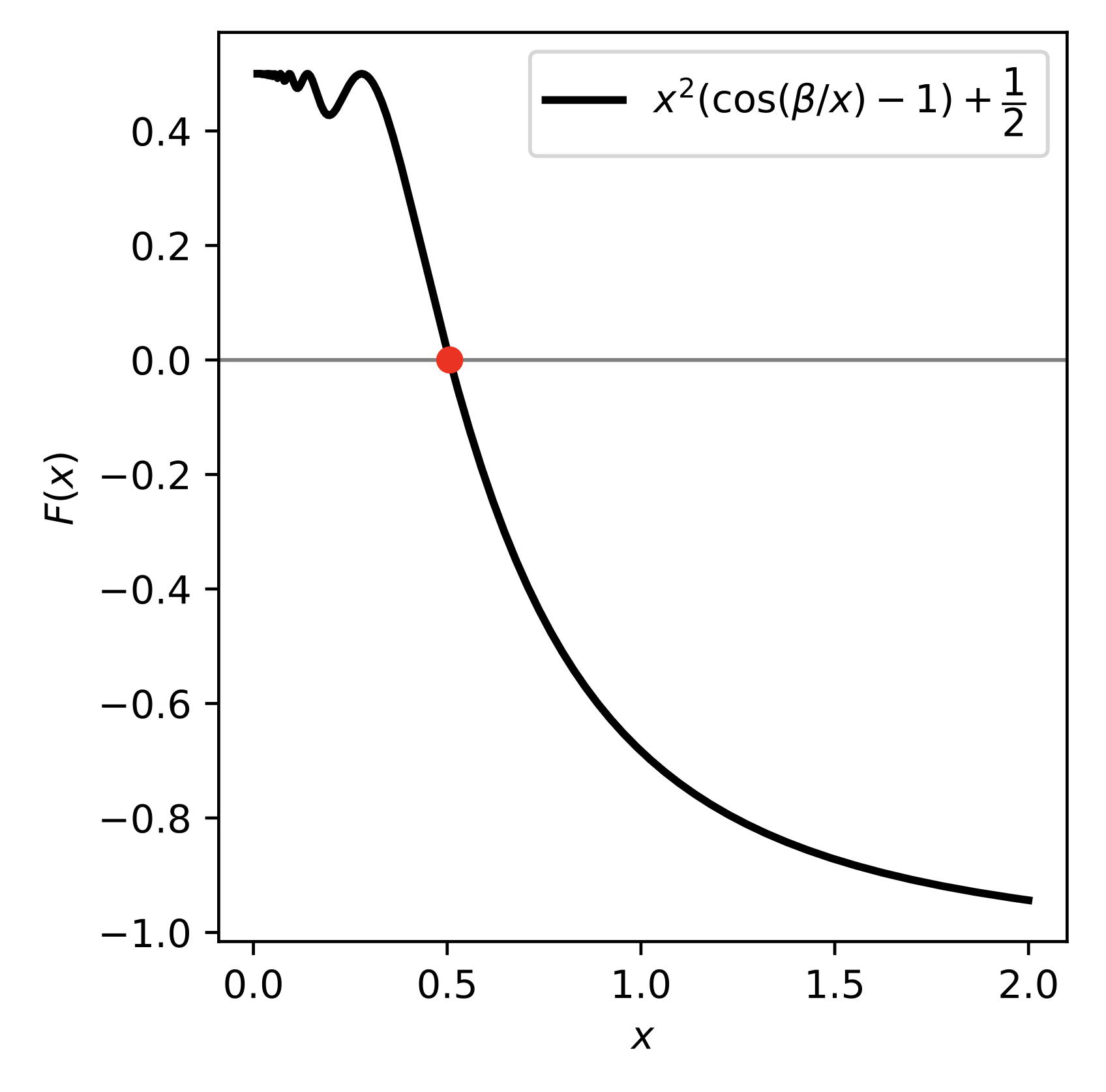
اکنون شتاب مربوط به نقطه برخورد در این حالت را پیدا میکنیم. فرض کنید $t=t_1=t_2$. دو طرف معادلات (۴) را با هم جمع میکنیم و $t$ را بهدست میآوریم. اکنون اگر مقدار $a$ در $t=2\sqrt{(2\Delta l \mathbin{-} l)/a}$ را در یکی از معادلهها قرار دهیم و تعریف کنیم $\beta = \sqrt{\left(\frac{\Delta l}{l} \mathbin{-} 1\right)}$ و $\alpha = \sqrt{\frac{a}{4g}}$ نتیجه میشود:
نگاره ۲: نمودار زمان پاره شدن نخها برحسب شتاب در حالت n=1.
نمودار تابع $F(x) = x^2\big(\cos(\beta/x) \mathbin{-} 1 \big) + \frac{1}{2}$ در شکل ۳ برای حالتی که در آن $\beta = \beta_1 \approx 1.755$ رسم شده است. با حل معادله $F(x) = 0$ (به وسیله کامپیوتر)، ریشه $0.507$ (که در شکل ۳ مشخص شده است) به دست می آید. یعنی شتاب لازم برای پاره شدن همزمان نخها تقریبا ده متر بر مجذور ثانیه است. که با نمودار شکل ۲ توافق دارد.
برای اینکه ثابت کنیم معادله $F(x) = 0$ فقط همین یک ریشه را دارد، کافی است ثابت کنیم که $F'(x)$ به ازای مقادیر $x$ بزرگتر از $\alpha$ نزولی است. این کار را میتوان با محاسبه $F'(x)$ و تقریب زدن $\cos(\beta/x)$ و $\sin(\beta/x)$ با چند جمله از بسط سری آنها به سادگی نشان داد. بنابراین $F(x) = 0$ فقط یک ریشه دارد.
اکنون نشان میدهیم که در همه حالتهای مورد بحث، موضوع به همین شکل است. یعنی همواره یک نقطه برخورد وجود دارد که برای شتابهای کوچکتر از شتاب آن نقطه، نخ بالایی و برای شتابهای بزرگتر از شتاب آن نقطه، نخ پایینی پاره میشود. ابتدا این موضوع را که معادله ۵ یک و فقط یک ریشه دارد، به مقادیر منطقی و مورد بحث در این مقاله تعمیم میدهیم (منظور از مقادیر مورد بحث $\beta$ بعدا مشخص میشود). فرض کنید که بخواهیم معادله (۵) را برای $\beta \approx \beta_2$ بررسی کنیم. اگر $d=\beta_2/\beta_1$ و $\beta_1 = 1.755$ در این صورت با تغییر متغیر $X = x/d$ حل معادله مورد نظر متناظر با یافتن ریشه $H(X)=0$ است که در آن
نمودار تابع $H$ از انتقال تابع $F$ به دست میآید. ولی نمودار $F(x)$ اگر تا جایی به پایین انتقال پیدا کند که قسمت تناوبی آن بالای محور $x$ قرار گیرد، نمودار فقط در یک نقطه با این محور برخورد خواهد کرد. با توجه به شکل ۳ میتوان دریافت که اگر انتقال حدوداً کمتر از $0.4$ واحد باشد یعنی اگر $(1/2) \mathbin{-} (1/2d^2) \leq 0.4$، این برخورد صورت نمیگیرد. این شرط با توجه به اینکه در نمودار شکل ۲ داریم $\Delta l/l \approx 2$ متناظر با این است که $\Delta l/l \leq 8$ باشد.
اما در چه حالتهایی بیش از یک نقطه برخورد وجود دارد؟ $\Delta l/l>8$ نشان میدهد که افزایش طول لازم برای پاره شدن نخ، هشت برابر طولی است که در ابتدا با وصل کردن جسم به آن داده میشود. این موضوع نشان میدهد که مقدار کش آمدن نخ و یا ثابتی که برای آن انتخاب کردهایم در مقابل جسم جرم آنقدر زیاد است که تاثیر جسم در پاره شدن نخ، که به صورت جمله نوسانی و مقدار $l$ در معادلات ظاهر میشود، تقریبا از بین میرود. زیرا اگر $\Delta l$ بسیار بزرگتر از $l$ باشد، از معادلات (۴) نتیجه میشود که تاثیر وجود جسم، که به صورت جمله کسینوس و همچنین کاهش مقدار کششی لازم برای پاره شدن نخ بالایی از $\Delta l$ به $\Delta l \mathbin{-} l$ ظاهر میشود، رفته رفته از بین میرود. بنابراین فقط حالتهایی را بررسی میکنیم که نسبت $\Delta l/l$ در حدی باشد که نقش وجود جسم در پاره شدن نخ کاملاً مشخص باشد. به همین دلیل است که در ابتدا جرمی بین دو نخ در نظر میگیریم و دستگاه را به طور قائم در شتاب گرانش قرار میدهیم.
تا اینجا مشخص شد که به ازای تمامی حالتهایی که جسم — با تقریب ما برای آنها — وجود دارد، یک و فقط یک شتاب $a_0$ موجود است که هر نخ را همزمان پاره میکند. اکنون اگر نشان دهیم که شتابهایی مانند $a_1$ و $a_2$ وجود دارند که به ازای $a_c < a_1$ و $t_1 > t_2$ و به ازای $a_c >a_2$ و $t_1 < t_2$ آنچه میخواهیم به آسانی ثابت میشود. اگر معادلات (۴) را به صورت زیر بنویسیم:
چون جمله کسینوس کراندار است با کم کردن $a$ برای مقادیر ثابت $\omega, l, \Delta l$ تاثیر این جمله کم و بیش از بین میرود، بنابراین همیشه میتوانیم $a <a_0$ را آنقدر کوچک بگیریم که این جمله در معادلات قابل چشم پوشی باشد. در این صورت $t_1 = 2\sqrt{(\Delta l \mathbin{-} l)/a}$ و $t_2 = 2\sqrt{\Delta l/a}$. پس همواره از$a <a_0$ نتیجه میشود $t_1 <t_2$.
حالا فرض کنید که $t_1$ و $t_2$ در معادله (۴) بسیار کوچک باشند، به طوری که بتوانیم بسط سری کسینوس را به صورت زیر بنویسم:
$$\Delta l \mathbin{-} l \approx (1 \mathbin{-} \frac{\omega^2 t_1^2}{2} + \frac{\omega^4 t_1^4}{4}\mathbin{-}1) \frac{a}{2\omega^2} + \frac{1}{4}at_1^2, \quad (۶)$$ $$\Delta l \approx \frac{\omega^2 t_2^2}{2} \frac{a}{2\omega^2}+ \frac{1}{4}at_2^2$$
در این صورت، این جوابها بهدست میآیند: $t_{1} = \sqrt[4]{\frac{48\,(\Delta l \mathbin{-} l)}{a\,\omega^2}}$ و $t_{2} = \sqrt{\frac{2\,\Delta l}{a}}$.
با توجه به فرض بسیار کوچک بودن $t_{1}$ و $t_{2}$ و اینکه $a$ برای جواب هر دو زمان در مخرج ظاهر شده است، نتیجه میگیریم که برای مقادیر بسیار بزرگ $a$، جوابهای (۴) با تقریب خوبی به شکل (۶) هستند. با توجه به جواب $t_{1}$ و $t_{2}$ اگر $a<a_c$ آنگاه $t_2<t_1$ به طوری که $a_c = \frac{\Delta l^2 \omega^2}{2(\Delta l \mathbin{-} l)}$. پس برای شتابهای بزرگ و زمانهای کوچک میشود دید که $t_2<t_1$.
بنا بر آنچه گفته شد، با فرض اینکه نمودار جوابهای (۴) در محدودهٔ مورد بررسی ناپیوستگیهای قابل ملاحظهای نداشته باشد (که فرض معقولی است) میتوانیم این نتیجهگیری کلی را بکنیم که برای شتابهای به اندازهٔ کافی بزرگ نخ پایین و برای شتابهای کوچک، نخ بالایی پاره میشود. این مطابق با جوابی است که به صورت شهودی به این مسئله داده میشود.
حالت خاص n=2
برای دو جسم، معادلات زیر را در مورد زمان پاره شدن نخها بهدست آوریم:
$$\Delta l \mathbin{-} l_1= \frac{a}{2\omega_1^2} \cos(\omega_1 t_1)\mathbin{-}\frac{a}{6\omega_2^2} \cos(\omega_2 t_1)+\frac{1}{6}at_1^2 \mathbin{-} \frac{4a}{9\omega_1}),$$ $$\Delta l \mathbin{-}l_2 = \frac{a}{3\omega_2} \cos(\omega_2 t_2) +\frac{1}{6}at_2^2\mathbin{-}\frac{a}{9\omega_1^2},$$ $$\Delta l = \frac{1}{6}at_1^2 \mathbin{-} \frac{a}{2\omega_1^2}\cos(\omega_1t_3)\mathbin{-} \frac{a}{6\omega_2^2}\cos(\omega_2t_3) + \frac{5}{9\omega_1^2}a. \quad (۷)$$
که در این معادلات $\omega_1^2 = \frac{k}{m}, \omega_2^2 = \frac{3k}{m}, l_1 = \frac{2mg}{k}, l_2 = \frac{mg}{k}$.
مشخص است که معادلات (۷) نسبت به حالت $n=1$ بسیار پیچیدهترند و بحث در مورد آنها بسیار دشوارتر از حالت قبل است. در این حالت، به بررسی جوابها فقط در یک مورد خاص بسنده میکنیم.
دوباره مقادیر قبلی را برای $\Delta l$ و $k/m$ در نظر بگیرید. اگر جوابهای (۷) را برای شتابهای مختلف با کمک کامپیوتر بهدست بیاوریم، به نمودار شکل ۴ میرسیم. در این نمودار رفتار شتاب تا $50 \text{ms}^{-2}$ بررسی شده است. این نمودار نشان میدهد که در شتابهای معمولی نخ وسطی پاره نمیشود. حل عددی به ما نشان میدهد که شتاب لازم برای کوچکتر شدن $t_2$ از $t_3$ در حدود ۲۵۰ متر بر مجذور ثانیه است و برای اینکه $t_2$ از $t_1$ کوچکتر شود شتاب بسیار بیشتر که منطقی نیست لازم است. بنابراین آنچه که ما در شتابهای معمولی میبینیم این است که مانند حالت $n=1$ برای شتابهای بهاندازه کافی کوچک، نخ بالایی و برای شتابهای بزرگ نخ پایینی پاره میشود.
نگاره ۴: زمان پاره شدن هر یک از نخها
نتیجهگیری
نتایجی که در پایان حالتهای خاص گرفته شد، یعنی پاره شدن نخ بالایی برای شتابهای کم و نخ پایینی برای شتابهای زیاد، با درک فیزیکی ما از مسئله کاملاً سازگار است. جوابهایی که در کلاسهای درس مکانیک به حالت $n=1$ داده میشود بیشتر جنبه کیفی دارد ولی آنچه ما در اینجا نشان دادیم، بیانگر این موضوع است که این جوابهای کیفی با حل کمی نیز تأیید میشوند. در طول حل مسئله مواردی پیش آمد که به منظور جلوگیری از پراکنده شدن مطلب اصلی، اقدام به بیان دقیق و بررسی جزئیات و انجام اعمال ریاضی نکردیم؛ دقیقتر کردن این موارد با کسی حوصلهمند امکانپذیر است (نویسنده این کار را انجام داده است). در هر صورت با وجود ایرادهایی که به فرضهای اولیه ما وارد است، مثلاً اینکه طبیعت نخها مخصوصاً در آستانه پاره شدن به صورت یک فنر ایدهآل که ما فرض کردیم رفتار نمیکنند و یا فرضیههایی مانند برابر بودن جرم اجسام و یا ثابت بودن شتاب پایین کشیدن نخها که از کلیت مسئله میکاهد، موضوع جالب توجه اینجاست که جواب بهدست آمده با تقریب در نظر گرفتن نخها بهصورت فنر در محدوده مورد بررسی، کاملاً با تجربه سازگار است و شهود کیفی ما را از مسئله تأیید میکند.
سپاسگزاری
در اینجا لازم است از آقای دکتر محمود بهمنآبادی که برای حل این مسئله از راهنماییهای ارزنده ایشان استفاده کردهام تشکر کنم.
شرلوک هولمز در کتاب نشانهٔ چهار روشی را برای کشف حقیقت بهکار میبرد که میتوان اسمش را گذاشت روش حذف ناممکنها: وقتی همهٔ حالتهای ناممکن را کنار گذاشته باشی، آنچه باقی میماند، هرچهقدر هم نامحتمل، باید حقیقت باشد.
این روش، مثل بسیاری از روشهای دیگری که هولمز به کار میگیرد، جذاب و هیجانانگیز است ولی آیا در عمل و در شرایط واقعی هم میتوان چنین روشهایی را بههمان سادگی بهکار برد؟ واقعیت این است که در عمل ممکن است موانع فراوانی کاربردپذیری این روش را به چالش بکشد. در این یادداشت به دو مورد از این موانع نگاه دقیقتری میاندازیم. نخست این که تشخیص ناممکن بودن بعضی حالتها که در ابتدا محتمل بودهاند با چه دقتی انجام میشود؟ آیا ممکن نیست خطایی در این تشخیص وجود داشته باشد؟ مثلاً در همین مکالمه که از کتاب نشانهٔ چهار نقل شد هولمز به واتسن میگوید: «میدانیم که او از در یا از پنجره یا دودکش وارد نشده» این «میدانیم» چهقدر دقیق است؟ آیا ممکن است خطایی در مشاهده یا جمعآوری شواهد وجود داشته باشد که این نتیجهگیری را نادقیق کند؟ دوم این که آیا همهٔ حالتهای ممکن از ابتدا در نظر گرفته شدهاند؟ مثلاً آیا ممکن است که بهجز در، پنجره، دودکش و سوراخ سقف راه دیگری هم برای ورود به اتاق بوده باشد که از نظر کارآگاه دور مانده باشد؟ چنین اتفاقاتی تا چه اندازه میتواند اعتبار نتیجهگیری نهایی را به خطر بیندازد؟
هولمز در حالی که سرش را تکان میداد گفت: تو به توصیهٔ من عمل نمیکنی. چند بار به تو گفتهام که وقتی ناممکن را حذف کرده باشی، آنچه باقی میماند، هر قدر هم بعید، باید حقیقت باشد؟ میدانیم که او از در یا از پنجره یا دودکش وارد نشده. این را هم میدانیم که نمیتوانسته در اتاق پنهان شده باشد، چون مخفیگاهی وجود ندارد. پس از کجا آمده؟
– من فریاد زدم از سوراخ سقف آمده؟ – معلوم است که از آنجا آمده.
برای بررسی خطای آزمونهایی که حالتهای ناممکن را مشخص میکنند مثال سادهای در نظر میگیرم. فرض کنید $n+1$ جعبه داریم که در یکی از آنها یک توپ وجود دارد. جعبهها را با $1,2,\cdots, n , z$ برچسب میزنیم. هیچ اطلاعات اضافهٔ دیگری که بتواند راهنمایی برای تشخیص جعبهٔ محتوی توپ باشد نداریم، بنابراین فرض میکنیم که توپ میتواند با احتمال یکسان در هر یک از این $n+1$ جعبه باشد. (میتوان مسئله را به شکل عامتری هم طرح کرد، مثلاً میتوان فرض کرد که احتمال این که توپ در جعبهٔ شمارهٔ $i$ باشد $p_i$ است و $\sum_{i=1}^n p_i+p_z=1$.)
فرض کنید $A_i$ پیشامد قرار داشتن توپ در جعبهٔ شمارهٔ $i$ باشد. همچنین فرض کنید برای تشخیص این که یک جعبه توپی در درونش ندارد از آزمایشی مانند تکان دادن جعبه یا اسکن کردن آن با پرتو ایکس استفاده کنیم. پیشامدی را که در آن نتیجهٔ آزمایش روی جعبهٔ شمارهٔ $i$ خالی بودن آن را نشان میدهد $E_i$ مینامیم. این آزمایش ممکن است خطا داشته باشد، بهاین معنی که ممکن است توپ در جعبهٔ شمارهٔ $i$ باشد ولی نتیجهٔ آزمایش خلاف این را گزارش کند. احتمال چنین خطایی را با $r$ نشان میدهیم. به بیان ریاضی $P(E_i|A_i)=r$.
جعبههای شمارهٔ $1$ تا $n$ را آزمایش میکنیم و نتیجهٔ آزمایش این است که توپ در هیچ یک از این جعبهها نیست. طبق روش هولمز میتوانیم بگوییم که توپ قطعاً در جعبهٔ $z$ است. اما احتمال خطا در آزمایشهای ما وجود دارد و بنابراین ممکن است توپ در یکی از جعبههایی باشد که آزمایش خالی بودن آن را نشان داده. در چنین شرایطی نمیتوان گفت که توپ قطعاً در جعبهٔ $z$ است. سؤال درست این است که احتمال قرار داشتن توپ در جعبهٔ $z$ چهقدر است. چنین احتمالی با عبارت ریاضی زیر بیان میشود $$P(A_z|\bigcap_{i=1}^{n} E_i) = P(A_z|E_1\cap E_2\cap \cdots \cap E_n) = P(A_z \mid \mathcal{E}).$$ در اینجا $\mathcal{E} := \bigcap_{i=1}^{n} E_i$ اشتراک بین همه پیشامدهاست. با به کارگیری قاعدهٔ بیز: $$\begin{aligned} P(A_z \mid \mathcal{E}) = \frac{P(A_z \cap \mathcal{E})}{P(\mathcal{E})} \end{aligned}$$ و در نتیجه $$P(A_z \mid \mathcal{E})= \frac{P(\mathcal{E} \mid A_z)\, P(A_z)}{P(\mathcal{E} \mid A_z)\, P(A_z) + \sum_{i=1}^{n} P(\mathcal{E} \mid A_i)\, P(A_i)}$$
فرض میکنیم آزمایشهای جعبههای مختلف مستقل باشند یعنی آزمایش یک جعبه روی نتیجهٔ آزمایش یک جعبهٔ دیگر اثری نداشته باشد. در اینصورت خواهیم داشت $$P(\mathcal{E}|A_z)=(1-r)^n$$ زیرا اگر توپ در جعبهٔ شمارهٔ $z$ باشد یعنی همهٔ آزمایشها نتیجهٔ درست دادهاند و احتمال درست بودن نتیجهٔ هر آزمایش $1-r$ است. بههمین ترتیب بهسادگی میتوان دید که $$P(\mathcal{E}|A_i)=r(1-r)^{n-1}\,, i=1,2,\cdots , n$$ و بنابراین \begin{eqnarray} P & = & \frac{(1-r)P(A_z)}{r\left(1-P(A_z)\right)+(1-r)P(A_z)}\nonumber\ & = & \frac{1-r}{nr+1-r}\nonumber \end{eqnarray} که در آن از $P(A_z)=\frac{1}{n+1}$ استفاده کردهایم.
بیایید نگاهی به نتیجهٔ این رابطه برای یک حالت مشخص بیندازیم. فرض کنید ده جعبه داریم (یعنی $n=9 $) و آزمایش ما برای تشخیص خالی بودن جعبهها ده درصد خطا دارد (به این معنی که به طور میانگین از هر ده آزمایش یکی نتیجهٔ نادرست میدهد). در این صورت رابطهٔ بالا میگوید که $P=0.5$. یعنی احتمال این که توپ در جعبهٔ آخر (جعبهای که آزمایش نشده) باشد پنجاه درصد است. بهطور کلی اگر احتمال خطا در آزمایش تشخیص حالتهای ناممکن برابر با احتمال همان حالتی باشد که در آخر و پس از حذف ناممکنها قرار است بهعنوان «حقیقت» معرفی شود، خطای تشخیص حقیقت پنجاه درصد خواهد بود!
خطا در تعیین همهٔ حالتهای ممکن
ایراد دیگری که میتواند کارایی این روش را به چالش بکشد این است که از ابتدا همهٔ حالتهای ممکن را تشخیص نداده باشیم و بعضی از آنها از چشم ما دور مانده باشند. اگر به مثال بخش قبل برگردیم میتوانیم فرض کنیم که مثلاً یک جعبهٔ دیگر (جعبهٔ شمارهٔ $m$ وجود دارد) که در میان $n+1$ جعبهٔ موجود نیست و مثلاً پشت یک پرده مخفی شده است ولی توپ میتواند درون آن جعبه هم باشد. احتمال وجود توپ در آن جعبه را با $P(A_m)$ نشان میدهیم. بهعبارت دیگر اگرچه ما تصور میکنیم که حاصلجمع احتمالهای وجود توپ در $n+1$ جعبهٔ موجود برابر با یک است ولی درواقع این احتمال کوچکتر از یک است: $$\sum_{i=1}^n P(A_i)+P(A_z)=1-P(A_m)$$. بنابراین حتی اگر آزمایشهای ما بیخطا باشند و بگویند که توپ در جعبههای شمارهٔ $1$ تا $n$ نیست باز هم ممکن است جعبهٔ شمارهٔ $z$ را باز کنیم و ببینیم که خالی است. احتمال چنین نتیجهٔ ناگواری $P(A_m)$ است. برای اجتناب از مواجه شدن با چنین وضعیتی باید حداکثر تلاش را برای تشخیص و بهحسابآوردن همهٔ حالتهای ممکن به خرج داد.
بهعنوان آخرین مثال حالتی را در نظر میگیریم که هم آزمایشها احیاناً خطا داشته باشند و هم از ابتدا همهٔ حالتهای ممکن تعیین نشده باشند و مثلاً جعبهٔ شمارهٔ $m$ از قلم افتاده باشد. در این صورت بهسادگی میتوان دید که وقتی آزمایشها نشان میدهند که توپ در هیچ یک از جعبههای $1$ تا $n$ نیست، احتمال پیدا کردن توپ در جعبهٔ $z$ برابر است با $$P=\frac{(1-r)P(A_z)}{r(1-P(A_z)-P(A_m))+(1-r)(P(A_z)+P(A_m))}$$ و باز اگر همهٔ جعبهها را هماحتمال بگیریم، یعنی $$P(A_z)=P(A_m)=P(A_i)=\frac{1}{n+2}$$ خواهیم داشت $$P=\frac{1-r}{nr+2(1-r)}.$$ برای مقایسهٔ این نتیجه با نتیجهٔ بخش قبل فرض میکنیم تعداد همهٔ جعبههای در اختیار ما ده تاست (یعنی $n=9$) ولی تعداد کل جعبهها درواقع یازده تاست و احتمال وجود توپ در این یازده جعبه یکسان است ($\frac{1}{11}$). احتمال خطای آزمایش را هم مانند قبل ۰/۱ میگیریم. در اینصورت احتمال یافتن توپ در جعبهٔ $z$ برابر خواهد بود با $P=\frac{1}{3}$. بهعبارت دیگر آن حالتی را که با روش حذف ناممکنها حقیقت محض میدانیم فقط کمی بیش از سی درصد احتمال دارد که حقیقت باشد!
سخن پایانی
دنیای واقعی بر خلاف دنیای قصهها پر از عدم قطعیت، خطا و بیدقتی است. در چنین دنیایی دست یافتن به حقیقت به سادگی قصهها نیست. بنابراین برای پرهیز از نتیجهگیری نادرست یا پیشبینی نادرست بهتر است تا حد امکان نگاه همهجانبه به پدیدهها داشته باشیم و امکان بروز خطا در مشاهدهها و آزمایشها را نیز نادیده نگیریم.
پارادوکس «گربه و نان کرهای»—این پرسش طنزآمیز که اگر به پشت یک گربه تکهای نان تُست کرهمالشده ببندیم، چه خواهد شد؟ نان تُست همیشه از سمتِ کرهایاش روی زمین میافتد و گربهها هم همیشه روی پاهایشان فرود میآیند؛ اما این تضادِ بامزه، درواقع تنها یک شوخی ذهنی است. با این حال، تواناییِ واقعیِ گربهها در اینکه هنگام سقوط، بدنشان را بچرخانند و روی پا فرود آیند، شوخی نیست. این مسئله سالها ذهن دانشمندان را به خود مشغول کرده بود، چرا که به نظر میرسید با یکی از اصول مهم فیزیک، یعنی «پایستگی تکانه زاویهای»، ناسازگار باشد. اگر گربه را به شکل استوانهای صُلب تصور کنیم، چنین جسمی هنگام سقوط نمیتواند ناگهان تکانه زاویهای تولید کند؛ ولی گربهها این کار را به سادگی انجام میدهند.
در سال ۱۹۷۵، جک هدرینگتون، مقالهای نوشت و در سراسر آن از ضمیر «ما» استفاده کرد. وقتی سردبیر ژورنال اعلام کرد که باید نویسندهٔ دوم نیز وجود داشته باشد، هدرینگتون برای آنکه مجبور به تایپ دوبارهٔ مقاله نشود، اسم گربهاش «چستر» را بهعنوان همکار نویسنده درج کرد. اکنون این گربه یک پروفایل رسمی با اسم اِف. دی. سی. ویلارد در گوگل اسکالر دارد که نشان میدهد مقالاتش تا امروز ۱۱۳ بار مورد استناد پژوهشگران دیگر قرار گرفته است!
گربهها موجودات عجیبی هستند. از هر جایی و هر طوری که رهایشان کنی، دست آخر روی پنجه فرود میآیند. بدن گربه نه یک استوانهٔ صُلب، بلکه مجموعهای انعطافپذیر از دو بخشِ جداگانه است که میتواند در جهات مخالف یکدیگر خم شود و بچرخد. چگونگی انجام این کار، اولین بار در سال ۱۹۶۹ توسط یک مدل ریاضی توضیح داده شد. انعاطفپذیری زیاد گربهها و اینکه در هر ظرفی جا میشوند و شکل آن را به خود میگیرند هم سبب شده تا مردم به شوخی بگویند گربه مایع است. ارک-آنتوان فاردین، در مقالهای با عنوانِ «گربههای مایع»، از آنها برای توضیح چند مفهوم پایهای در رئولوژی (مطالعه جریان و تغییر شکل مواد) استفاده کند. این پژوهش شوخطبعانه باعث شد فاردین در سال ۲۰۱۷ جایزهٔ ایگ نوبل فیزیک را دریافت کند.
اما در دنیای فیزیک، مشهورترین گربه، «گربهٔ شرودینگر» است. این آزمایش فکری را اروین شرودینگر، ابتدا برای انتقاد از «تفسیر کپنهاگی مکانیک کوانتومی» مطرح کرد. هدف او تأکید بر تناقضی بود که در قلب نظریهٔ کوانتوم وجود داشت: گربهای که همزمان هم زنده و هم مرده است. شرودینگر شاید صرفاً به دنبال تأکید بر یک نکتهٔ عجیب و غیرمعمول بود؛ اما برهمنهیِ کوانتومی که گربهٔ فرضیاش توصیف میکند کاملاً واقعی است.
در فیزیکِ نور میتوان دو حالت نوری را که فازهای متفاوت و متضادی دارند با هم ترکیب کرد و وضعیتی به نام «حالت گربهای» ساخت. اگر شدت نور در چنین حالتی اندک باشد، به آن «حالت بچهگربهای» میگویند. این «حالتهای گربهای» صرفاً کنجکاوی نظری نیستند؛ آنها کاربردهایی جدی در حوزهٔ اطلاعات کوانتومی دارند. برای نمونه، «کدهای گربهای» یکی از روشهای معروف برای تصحیح خطا در رایانش کوانتومی هستند.
در داستان آلیس در سرزمین عجایب، «گربهٔ چشایر» میتواند بهتدریج ناپدید شود و تنها لبخندش را در هوا باقی بگذارد. اخیراً دانشمندان حالتی کوانتومی به نام «گربهٔ چشایرِ کوانتومی» را شناسایی کردهاند که در آن ویژگیهای یک ذره (مانند تکانهٔ مغناطیسی) میتواند از خودِ ذره جدا شده و در مسیر متفاوتی حرکت کند. این گربههای عجیب حتی میتوانند ویژگیهایشان (مانند همان لبخند معروف) را با هم مبادله کنند!
The physics of cats. Nat Rev Phys7, 165 (2025) https://doi.org/10.1038/s42254-025-00824-6
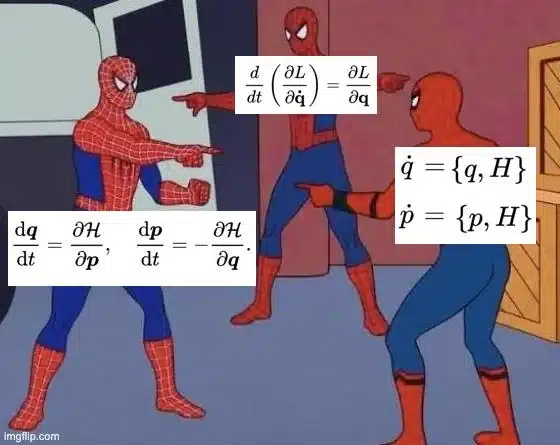
این میم بهونه خوبیه که در مورد روشهای متفاوتی که میشه مکانیک کلاسیک رو ارائه کرد حرف زد. پس توی این نوشته، بدون پرداختن به مکانیک کوانتومی، سراغ فرمول بندیهای مدرنی میریم که برای توصیف حرکت داریم.
صورتبندی نیوتون
نخستین فرمول بندی همانچیزی است که همه ما در مدرسه با آن آشنا شدهایم؛ صورتبندی نیوتون. نیوتون با ارائه سه قانون، چارچوبی کلی برای مطالعه حرکت معرفی کرد. با پذیرفتن این سه قانون، میشود حرکت ذرات غبار در هوا یا حرکت سیارات و کهکشانها را با دقت خوبی توضیح داد و پیش بینی کرد. به طور خلاصه به کمک قوانین نیوتون میتوانیم بگوییم زمین چگونه به دور خورشید میچرخد و اگر توپی را با فلان سرعت پرتاپ کنیم، کی به کجا میرسد.
قانون اول نیوتون در مورد ناظر است. این قانون میگوید برای داشتن درک درستی از حرکت اجسام، کسی که آنها را مشاهده میکند هم مهم است. در واقع نیوتون قوانین حرکتش را برای ناظرهایی ارائه میدهد که در ابتدای امر تکلیف آنها را مشخص کرده: ناظرهای لَخت. تعریف ساده ناظر لخت این گونه است: اگر جسمی را منزوی کنیم جوری که هیچ جسم دیگری روی آن اثری نگذارد، آن موقع، ناظر مورد نظر ما آنی است که ببیند جسم با سرعت ثابتی حرکت میکند. قاعدتا سرعت صفر(بیحرکتی) هم شامل این مورد میشود. بعد از مرور قانون دوم دوباره به این قانون فکر کنید. قانون اول از قانون دوم نتیجه نمیشود!
به دنبال قانون اول، قانون دوم نیوتون شیوه ترجمه اثرات خارجی وارد بر یک جسم به تغییرات سرعت آن را توضیح میدهد. بیان ریاضی این قانون معادلهی دیفرانسیل مرتبه دویی است که در یک طرف آن تغییرات تکانه جسم و طرف دیگر آن همه اطلاعات مربوط به اثرات خارجی را در قالب کمیت برداری به اسم نیرو قرار میدهد. دراینجا، تکانه جسم، حاصلضرب کمیتی ذاتی به اسم جرم جسم در سرعت آن است. جرم جسم $m$ در این قانون، پارامتری است که آهنگ تغییرات سرعت جسم $\dot{\textbf{v}}$ به واسطه نیروهای وارد شده به آن یعنی $\textbf{F}$ را کنترل میکند.
$$\textbf{F} = m \frac{d^2\textbf{x}}{dt^2} = m\dot{\textbf{v}}$$
در فیزیک رسم است که مشتق زمانی یک کمیت را با گذاشتن یک نقطه بالای آن نشان میدهیم. اینکه چرا قانون دوم توسط یک معادله دیفرانسیل مرتبه دو توصیف میشود، چیزی است که طبیعت انتخاب کرده. با این وجود این انتخاب برای ما تا حدودی خوشایند است. از لحاظ ریاضی تفسیر این معادله این است که اگر ما بدانیم بر جسمی چه نیروهایی وارد میشود و سرعت و مکان آن را در هر لحظه بدانیم، دیگر نیازی نیست اطلاعات بیشتری داشته باشیم تا حرکت آن جسم را توصیف کنیم. یعنی مکان و سرعت در یک لحظه تمام اطلاعات اولیهای است که به آنها نیاز داریم و بقیه اطلاعات دیگر را میتوانیم حساب کنیم. زیباست. نه؟!
قانون سوم نیوتون را به شیوههای مختلفی میشود بیان کرد که حتما در مورد آن شنیدهاید. آنچه که برایتان شاید جالب باشد این است که این قانون کامل نیست. منظور از کامل نبودن این است که در بعضی مسائل به تنهایی توصیف درستی ارائه نمیکند. چرا و چگونهاش بماند برای بعد. چیزی که الان مهم است این است که به واسطه قانون سوم نیوتون میشود روشی برای مقایسه و اندازه گیری جرم اجسام گوناگون پیدا کرد. پس به لطف این قانون، تکلیف جرم جسم مشخص میشود. حالا کافی است که نیروها را مشخص کنیم. آنموقع به واسطه قانون دوم میتوانیم حرکت یک جسم را توصیف کنیم. مشکل اینجاست که قوانین نیوتون به تنهایی این کار را برای ما انجام نمیدهند. یعنی در کنار این سه قانون، باید صورتبندیهایی برای نیروهای مختلف هم پیدا کنیم. خوشبختانه به نظر میرسد که تعداد نیروهای بنیادی از شمار انگشتان یک دست کمترند. در زندگی روزمره ما، نظریههای گرانش و الکترومغناطیس تقریبا همه نیروهای وارد بر اجسام را توصیف میکنند. به طور خلاصه، هر بار که چیزی میافتد به خاطر گرانش است و هر چیز دیگر تقریبا منشا الکترومغناطیس دارد از جمله بالا بردن اجسام توسط بازوی ما یا آسانسور منزل!
حالا ما میتوانیم طبیعت را توصیف کنیم. یا دست کم حرکت در طبیعت را تا وقتی که اثرات کوانتومی یا نسبیتی وارد نشدهاند را با دقت خوبی توضیح دهیم.
اما این فقط یک روایت از طبیعت است. ما میتوانیم این داستان را جور دیگری هم بیان کنیم. یعنی میشود حرکت اجسام را جور دیگری هم صورتبندی کرد بدون اینکه با صورتبندی نیوتون ناسازگار از آب درآیند. صورتبندیهایی که همین حرفها را با ریاضیات متفاوتی بیان کنند و چه بسا قدرت عمل بیشتری به ما در محاسبات و تعمیم ایدهها — فرای مکانیک استاندارد — هم دهند.
آرامگاه نیوتون در کلیسای وستمینستر لندن
اصل کمترین کنش و روش لاگرانژ و همیلتون
فرض کنید شما سامانهای را در یک لحظه میبینید. سپس چشمانتان را برای مدت کوتاهی میبندید، دوباره باز میکنید و در لحظه جدید سامانه را در موقعیت جدیدش مشاهده میکنید. برای مثال، توپی را تصور کنید که در لحظه اول در نقطه پنالتی و در لحظه بعدی در کنج دروازه جا گرفته. حالا تمام مسیرهایی که توپ ممکن است بین این دو لحظه طی کرده باشد را تصور کنید. مثلا یک مسیر این است که توپ مستقیم از نقطه پنالتی به کنج دروازه رفته باشد. یک مسیر ممکن دیگر این است که توپ روی منحنی هیجانانگیزتری حرکت کرده و به کنج دروازه نشسته. یک مسیر هم میتواند این باشد که توپ به هوا رفته، چرخیده و دست آخر برگشته و وارد دروازه شده. حالا فرض کنید، به هر کدام از این مسیرها کمیتی نسبت میدهیم به نام کُنِش و ما کنش همه مسیرها را در جدولی یادداشت میکنیم.
هیچکس تا به حال ندیده که ضربه پنالتی به عقب برود و سپس به درواز برگردد. منطقی نیست. یا به عبارتی این مسیری نیست که طبیعت اجازه طی شدنش را بدهد وقتی شخصی به سمت دروازه ضربه میزند. پس قرارداد میکنیم که مسیری مجاز است که توسط طبیعت انتخاب شود و طبیعت مسیری را انتخاب میکند که کمترین (اکسترمم) کنش را داشته باشد. به این قاعده، اصل کمترین کنش یا اصل همیلتون میگویند. در عمل، همانطور که برای پیدا کردن نقاط اکسترمم توابع مشتق پذیر، به دنبال ریشههای مشتق آن تابع میگردیم، اینجا هم ایدههایی مشابه وجود دارد که نیاز نباشد همه مسیرها را امتحان کنیم. حالا فرض کنید که مسیری که کمترین کنش را دارد را پیدا کردهایم. پس اگر اندکی آنرا تغییر دهیم نباید کنش مسئله تغییر چشمگیری کند. درست همانطور که مثلا تابع $y = x^2$ در نقطه صفر که کمینه آن است تغییر چندانی نمیکند.
کنش $S$ را به صورت ریاضی میتوانیم به صورت انتگرال زمانی تابع دیگری به نام $L$ بنویسم. چرا؟ چون این کَلک خوبی است که در ادامه از آن لذت خواهیم برد! اسم انتگرالده را هم به احترام آقای لاگرانژ و زحماتی که برای این صورتبندی پیشتر از خیلیها انجام داده لاگرانژی میگذاریم. لاگرانژی تابعی از مکان، سرعت و احیانا زمان است. کلا بنا را هم بر این بگذارید که داریم بازی ریاضی میکنیم با این ایده که گویی لاگرانژی اطلاعات مربوط به ویژگی های ذاتی جسم و برهمکنشهای آن با دیگر ذرات و موجودات دیگر را دارد و ما میخواهیم همه این اطلاعات بین دو زمان مشخص را به کنش نسبت دهیم. پس مینویسیم
$$S = \int^{t_2}_{t_1} L(q , \dot q, t) \, dt. $$
تا اینجا هیچ کار عجیبی نکردهایم. فرض کردهایم چیزی وجود دارد به اسم کنش که به صورت یک انتگرال تعریف میشود. همینطور از مختصات تعمیم یافته $q$ و $\dot q$ برای نشان دادن مکان و سرعت استفاده کردهایم گویی میخواهیم از مختصه جدیدی به جای مثلا $x$ استفاده کنیم.
حالا میخواهیم ببینیم مسیر بهینه که اسمش را میگذاریم $q_{c(t)}$ چگونه به دست میآید. طبق چیزی که تعریف کردهایم، مسیر بهینه باید کنش را کمینه (یا به عبارت فنیتر اکسترمم) کند. پس تحت تغییرات بینهایت کوچک مسیر، کنش متناظرش نباید تغییر خاصی کند. درست مانند وقتی که مشتق توابع پیوسته — که نشاندهنده تغییرات آن توابع هستند — در نقاط بیشینه یا کمینهشان صفر هستند. پس بیاید تغییرات کنش را حساب کنیم و برابر با صفر قرار دهیم
جمله ی آخر صفر است چون که ابتدا و انتهای مسیر را ثابت کردهایم. البته میشد این انتخاب را انجام نداد و از جملات مرزی در مواردی استفاده کرد. اما برای این نوشته همین قدر جزئیات کافی است. از آن جا که $\delta q_{(t)}$ تغییراتی دلخواه است و برای مثال میتواند فقط در زمان دلخواه $t$ غیر صفر (تقریبا و با اغماض شبیه دلتای دیراک) باشد، انتگرالدهمان باید در هر لحظه صفر باشد. پس کمینه کردن کنش، $\delta S =0$، نتیجه میدهد
این معادله همان چیزی است که بالای سر مرد عنکبوتی وسطی ابتدای این نوشته قرار دارد و در جامعه فیزیک مشهور است به معادله اویلر–لاگرانژ. این معادله معادلات حرکت را نتیجه میدهد. درست مانند قانون دوم نیوتون.
ولی لاگرانژی واقعا چیست؟ این سوال کمابیش در زبان نیوتونی مثل آن است که بپرسیم چه نیروهایی بر جسم وارد میشوند. برای پاسخ به این پرسش نیاز به شناخت سیستم و برهمکنشهای آن داریم. مثلا برای ذرهای که در حال حرکت تحت یک پتانسیل است، لاگرانژی این سیستم برابر با با اختلاف انرژی جنبشی و پتانسیل آن ذره است. توجه کنید که لاگرانژی کمیتی نردهای است، برخلاف نیرو که کمیتی برداری است. از لحاظ ریاضی کار کردن با کمیتهای نردهای خیلی راحتتر است. این اولین حسن صورتبندی جدید است. همین طور توجه کنید که از لحاظ ابعادی، لاگرانژی بعد انرژی دارد. نکته دیگری که بد نیست بدانید این است که خیلی از اوقات لاگرانژی را بنا بر یک سری تقاضاهای فیزیکی مانند تقارن های حاکم بر سیستم حدس میزنیم. برای دیدن چند مثال در این مورد به این نوشته نگاه کنید: تقارن،قوانین پایستگی و اِمی نٌودِر.
این ویدیو سیر تاریخی این مسئله را به خوبی نشان میدهد:
منتظر ادامه این نوشته باشید.
اما اگر عجله دارید، این ویدیوها و این کتاب را نگاه کنید:
حدود ۳۰ سال از تأیید کشف اولین سیاره فراخورشیدی (سیارهای بیرون از منظومه شمسی) در سال ۱۹۹۲ میلادی میگذرد. بهلطف رصدهای زمینی و مأموریتهای فضایی انجامشده، تابهحال کشف بیش از پنج هزار سیاره فراخورشیدی بهمرحله تأیید رسیده است. سیاراتی که چالشی بزرگ بر سر مدلهای شکلگیری سیارات قرار دادهاند. سیاراتی که طیف وسیع جرم و ویژگیهای ساختارشان باعث شده حتی تعریف دقیق یک سیاره، و مثلاً تفاوت آن با یک کوتوله قهوهای، در هالهای از ابهام فرورود! اما منجمان چطور این سیارات را کشف کردهاند؟
در ویدیوی زیر که مربوط به جلسه کافه فیزیکِ انجمن فیزیک دانشگاه شهید بهشتی بهمناسبت هفته جهانی امسال است، درمورد روشهای متداول برای کشف سیارات فراخورشیدی و ایده اصلی این روشها توضیح دادهام.
«دقت ریاضی بسیار زیاد در فیزیک استفاده چندانی ندارد. اما کسی نباید از ریاضیدانها در این باره اشکالی بگیرد […] آنها دارند کار خودشان را انجام میدهند.»
از دید بسیاری از فیزیکدانها، دقت ریاضی (mathematical rigor) در اکثر اوقات برای جامعه فیزیک غیرضروری بوده و حتی با کند کردن سرعت پیشرفت فیزیک میتواند برای آن مضر نیز باشد.
شاید بتوان دلیل فاینمن را برای بیان این نظر درک کرد؛ برای لحظهای تصور کنید که فاینمن فرمالیسم انتگرال مسیر خود را به دلیل وجود نداشتن تعریف دقیق ریاضی از این انتگرالهای واگرا (که تا به امروز نیز تعریف جامع و دقیقی از آنها در دسترس نیست) معرفی نمیکرد و یا فیزیکدانها به دلیل وجود نداشتن تعریف اصول موضوعهای از نظریه میدانهای کوانتومی، از آن استفاده نمیکردند! قطعا انتظار سطح یکسانی از دقت ریاضی در اثبات قضایای ریاضی و در نظریههای فیزیکی انتظاری بیش از حد سنگین و غیر عملی است اما، بر خلاف برداشت رایج در بین فیزیکدانها، دقت ریاضی همیشه به معنی جایگزین کردن استدلالهای بدیهی اما غیر دقیق با اثباتهای خسته کننده نیست. در بیشتر اوقات دقت ریاضی به معنی مشخص کردن تعریفهای دقیق و واضح برای اجزای یک نظریه است به طوری که استدلالهای منطبق بر شهود با قطعیت درست هم باشند! شاید بتوان این مطلب را در نقل قول زیر خلاصه کرد:
«دقت ریاضی پنجرهای را غبارروبی میکند که نور شهود از طریق آن به داخل میتابد.»
در فرمولبندی نظریههای فیزیکی، بیتوجهی به پیشفرضها و ظرافتهای ریاضی میتواند به سادگی به نتایجی در ظاهر متناقض بیانجامد که در بسیاری از موارد عجیب و حیرتانگیز به نظر میرسند. این مثال ساده از مکانیک کوانتومی را در نظر بگیرید: برای ذرهای کوانتومی در یک بعد، عملگرهای تکانه خطی P و مکان Q از رابطه جابهجایی هایزنبرگ پیروی میکنند
حال با گرفتن رد (trace) از دو طرف این رابطه مشاهده میکنیم که رد طرف چپ این معادله با استفاده از خاصیت جابهجایی عمل ردگیری صفر میشود در حالی که رد سمت راست این معادله غیر صفر است! از آنجا که این رابطه یکی از بنیادینترین روابط مکانیک کوانتومی است و بسیاری از مفاهیم عمیق فیزیکی مکانیک کوانتوم نظیر اصل عدم قطعیت از آن نتیجه میشود، این نتیجه (به ظاهر) متناقض حیرت انگیز به نظر میرسد! برای پیدا کردن مشکل بیاید نگاه دقیقتری به رابطه جابهجایی هایزنبرگ و دامنه اعتبار تعریف عمل ردگیری بیاندازیم: فرض کنید رابطه جابهجایی بالا برای دو عملگر P و Q، که روی فضای هیلبرت H با بعد متناهی n تعریف میشوند، برقرار باشد. در این صورت، عملگرهای P و Q با ماتریسهای n*n مختلط داده خواهند شد و عمل ردگیری از آنها خوشتعریف است. بنابرین، نتیجه متناقض
نشان میدهد که رابطه جابهجایی هایزنبرگ نمیتواند روی فضاهای هیلبرت با بعد متناهی برقرار باشد. در نتیجه مکانیک کوانتومی باید روی فضای هیلبرت با بعد نامتناهی (اما شمارا) تعریف شود: روی چنین فضاهایی عمل ردگیری برای تمام عملگرها خوشتعریف نبوده (به طور مشخص رد عملگر واحد روی این فضاها تعریف نشده است) و نمیتوان تناقض بالا را روی این دسته از فضاها نتیجهگیری کرد! با تعمیم تناقض بالا به فضاهای هیلبرت بینهایت بعدی حتی میتوان نتیجه قویتری نیز درباره عملگرهای تکانه و مکان گرفت ــ حداقل یکی از این عملگرها باید بیکران (unbounded) باشد؛ این بدان معنی است که مقادیر ویژه کراندار نبوده و این عملگر روی تمام فضای هیلبرت خوشتعریف نخواهد بود! این نتیجه خود به آن معنی است که نه عملگرهای خلق و فنا و نه عملگر هامیلتونی (انرژی) روی تمام حالات فضای هیلبرت نوسانگر هماهنگ خوشتعریف نیستند (هر چند میتوان بستار این عملگرها را روی کل فضای هیلبرت تعریف نمود). هر کدام از این نتایج خود منجر به نتیجهگیریهای شگفتانگیز دیگری میشوند که ما را مجبور میسازند در تعریف بسیاری از مفاهیم به نظر بدیهی تجدید نظر کنیم: برای مثال، در فضاهای هیلبرت بینهایت بعدی و در حالتی که تمام عملگرهای فیزیکی کراندار باشند، میتوان حالتی را متصور شد که فضا هیلبرت شامل هیچ حالت غیر درهمتنیدهای بین دو «زیر سیستم» نباشد و در نتیجه نتوان آن را به صورت ضرب تانسوری دو فضای هیلبرت متعلق به هر زیر سیستم نوشت! این مسئله نیاز به تعریف دقیقتری از مفهوم «زیر سیستم» در نظریه میدانهای کوانتومی و تعمیمهای آن (مانند نظریه گرانش کوانتومی) را نشان میدهد که خود میتواند به حل شدن بخشی از تناقضهای عمیقتر مانند مسئله اطلاعات سیاهچالهها منجر شود! توجه کنید که دقت به دامنه اعتبار رابطه جابهجایی هایزنبرگ به نوبه خود چگونه میتواند ما را در درک بهتر درهمتنیدگی در نظریه میدانهای کوانتومی و سوالاتی عمیقتر از جمله ساختار علی فضا و زمان و یا مسئله اطلاعات سیاهچالهها یاری کند! مثالهایی از این دست در مکانیک کوانتومی و نظریه میدانهای کوانتومی به فراوانی یافت میشوند که چند مثال دیگر و توضیح مفصل در مورد چگونگی حل آنها را میتوانید در مقاله آموزشی (و بسیار هیجانانگیز) زیر پیدا کنید:
By a series of simple examples, we illustrate how the lack of mathematical concern can readily lead to surprising mathematical contradictions in wave mechanics. The basic mathematical notions allowing for a precise formulation of the theory are then summarized and it is shown how they lead to an elucidation and deeper understanding of the aforementioned problems. After stressing the equivalence between wave mechanics and the other formulations of quantum mechanics, i.e. matrix mechanics and Dirac’s abstract Hilbert space formulation, we devote the second part of our paper to the latter approach: we discuss the problems and shortcomings of this formalism as well as those of the bra and ket notation introduced by Dirac in this context. In conclusion, we indicate how all of these problems can be solved or at least avoided.